








 Позвонить бесплатно
Позвонить бесплатно
Спецификация отправлена на Ваш E-mail.
Данное письмо может попасть в папку "СПАМ"
Разработка робото-технологического комплекса (РТК) предназначенного для обслуживания токарных станков
Описание технологического процесса
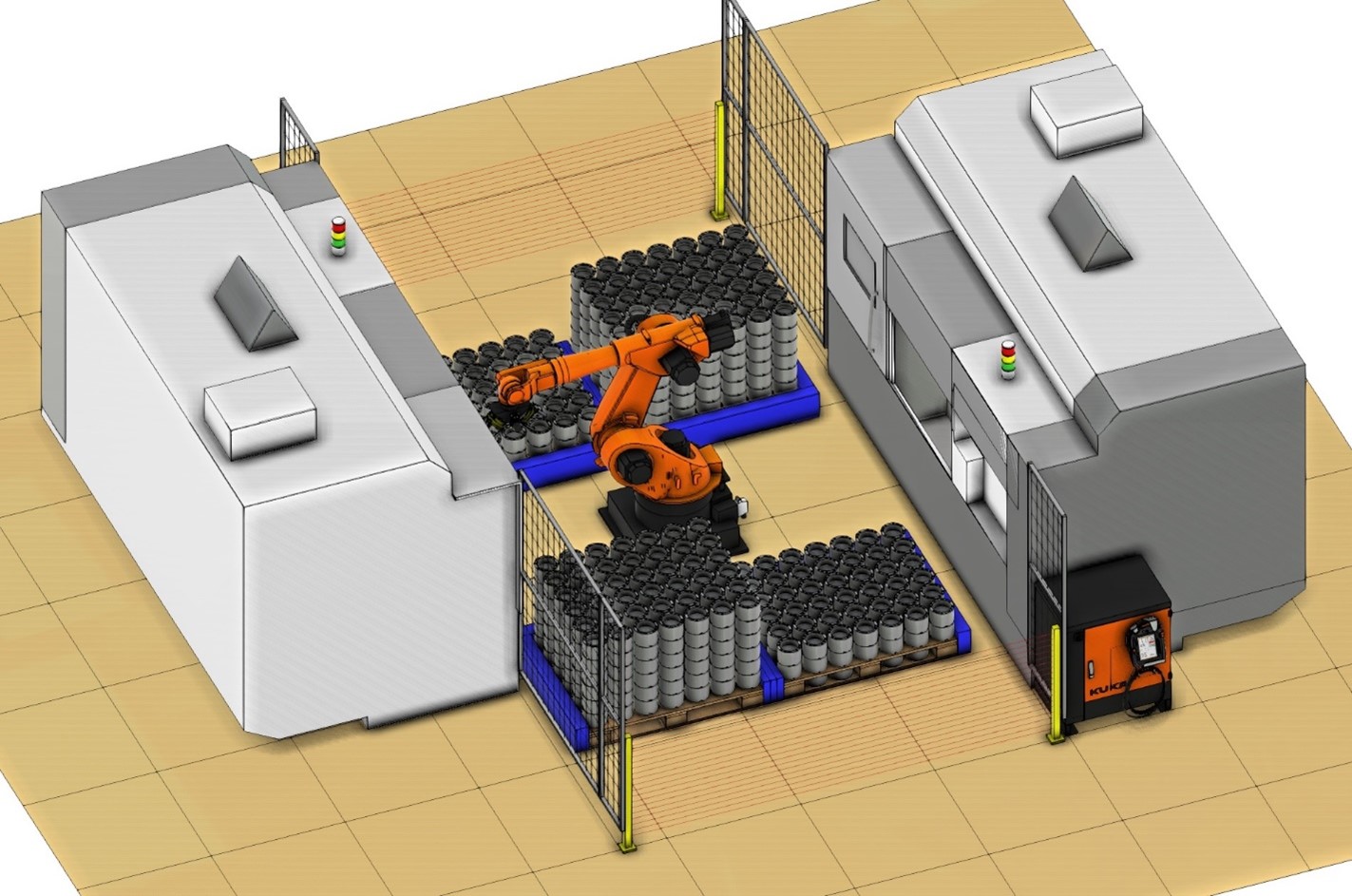
РТК укомплектован промышленным роботом KUKA KR 60 L30-3, установленным на пьедестале и оснащенным пневматическими трехпальцевыми захватами. Захват укомплектован двумя типами быстросъемных пальцев для работы с заготовками разных диаметров. Заготовки до и после обработки размещаются на деревянных паллетах, установленными по базирующим уголкам в двух рабочих зонах. Для определения положения заготовок, расположенных на еревянных паллетах используется система технического зрения, камера которой установлена на 6-ой оси робота вместе с захватом.
Технологический процесс:
1. Оператор размещает паллету с заготовками и пустую паллету в одной из рабочих зон робота. Выйдя из рабочей зоны, оператор с помощью пульта управления дает команду на начало технологической операции.
2. Робот, получив сигнал от системы управления станка об открытии дверей, выполняет определение положение заготовки при помощи камеры СТЗ и производит захват заготовки, затем устанавливает ее в патроне первого станка. Начинается обработка в станке.
3. Далее, робот осуществляет загрузку заготовки во второй станок по алгоритму аналогичному в п.2.
4. После получения сигнала о завершении обработки заготовки и остановки шпинделя станка, заготовки поочередно снимаются со станков и укладываются на столы, предназначенные для обработанных заготовок.
5. Далее действия с п.2 по п.4 повторяются, пока не закончатся необработанные заготовки на столах- накопителях.
6. В процессе выполнения операций описанных в п.п. 2-5, оператор устанавливает паллету с заготовками и пустую паллету во второй рабочей зоне робота.
7. При завершении обработки заготовок в первой рабочей зоне робот начинает работать с заготовками во второй рабочей зоне.
Смотрите ещё больше интересного на нашем YouTube-канале и в Instagram:




