







 Позвонить бесплатно
Позвонить бесплатно
Спецификация отправлена на Ваш E-mail.
Данное письмо может попасть в папку "СПАМ"
Разработка робото-технологического комплекса (РТК) обслуживания прессов КАНТАР и ХИТ
Описание технологического процесса
Для обеспечения обслуживания двух прессов одним роботом необходимо произвести перестановку подвижного пресса, как показано на рисунке.
Технологический процесс:
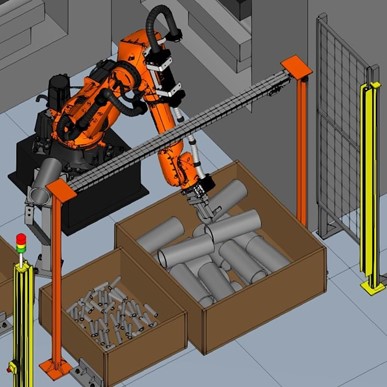
- Перед началом работы РТК обслуживающий персонал устанавливает тары с неупорядоченно расположенными заготовками на парковочные места, после чего покидает рабочую зону РТК и осуществляет запуск программы на выполнение в зависимости от типа заготовок.
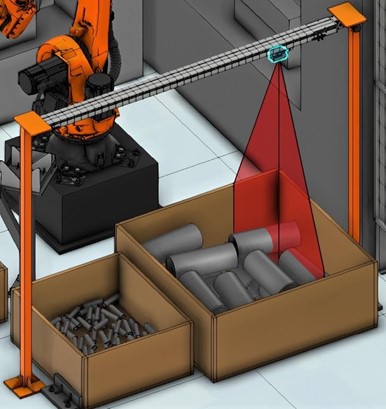
- Система технического зрения сканирует тары с заготовками для определения их расположения относительно системы координат робота. Требуемая зона сканирования достигается за счет перемещения сканирующего устройства при помощи линейной направляющей.
- Робот, получив от СТЗ информацию о расположении осуществляет схват заготовки при помощи пневматического захвата, установленного на 6й оси.
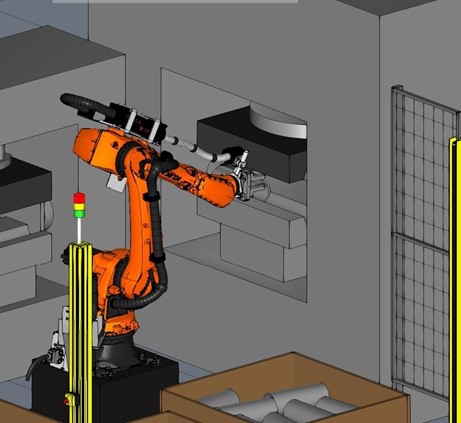
- Для обеспечения требуемого положения заготовки в матрице пресса перед ее обработкой (сварной шов заготовки направлен в определенную сторону) робот производит определение положения шва заготовки при помощи соответствующего устройства. Для этого робот перемещает и устанавливает заготовку в ложемент устройства определения положения шва, после чего сканер устройства производит сканирование торца заготовки. Получив информацию от сканера, робот производит схват заготовки с учетом положения сварного шва и установку заготовки в матрицу пресса.

- Во время обработки заготовки на первом прессе (очередность обслуживания прессов происходит согласно заданной программе работы РТК) робот осуществляет аналогичные вышеописанные процессы со вторым прессом.
- Далее цикл повторяется.
Смотрите ещё больше интересного на нашем YouTube-канале и в Instagram:




