




г. Соликамск,
ООО Завод металлических изделий, 2024
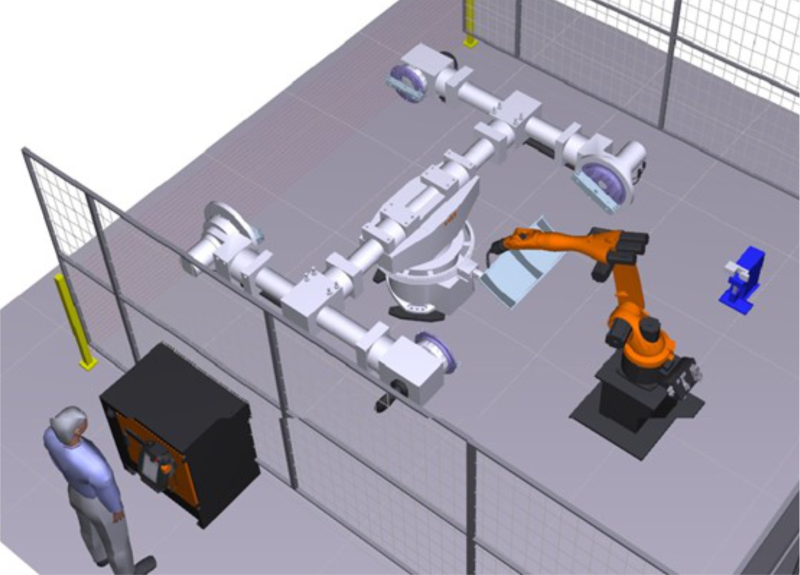
Роботизированный комплекс сварки на базе промышленного робота KUKA
Заказчик:
ООО «Челябинский завод современных конструкций», г. Челябинск
Год завершения:
2014 На базе роботов:
KUKA

Задача
Состав РТК
- Робот KUKA KR 5 Arc на пьедестале с контроллером и ПО
- Позиционер трехосевой KPF3-V2H500 с защитным экраном (500 кг на каждую сторону)
- ПО KUKA.ArcTech Analog 1.3
- ПО ARC-sense PCI-card (for ARCTech Analog) слежение за сварным швом
- TouchSense 1.3
- Лазерная система поиска шва
- Система безопасности
- Цифровая сварочная система KempArc Pulse 450
- Сварочная горелка Robo WH 290
- Устройство подачи проволоки DT 400
- Устройство автоматической очистки горелки Binzel Robo
Технологический процесс
После установки и крепления изделия в первой рабочей зоне позиционера оператор выходит из зоны загрузки и дает команду с пульта управления на поворот позиционера. После чего позиционер поворачивается вокруг вертикальной оси на 180 градусов, располагая установленную заготовку в зоне досягаемости робота. Затем оператор через пульт управления вызывает программу для сварки необходимого типа заготовки, и робот начинает движение по заданной траектории. При этом горизонтальные оси позиционера обеспечивают поворот заготовки таким образом, чтобы обеспечить досягаемость сварочной горелки до всех точек траектории сварочного шва.
Во время сварки одной или нескольких заготовок, установленных в первой рабочей зоне позиционера, оператор устанавливает заготовки во второй рабочей зоне позиционера, исключая потери времени на их установку на позиционер. После завершения программы сварки позиционер поворачивается на 180 градусов, и оператор сначала извлекает готовую деталь, а затем устанавливает следующую заготовку. Далее цикл повторяется.

Смотрите ещё больше интересного на нашем YouTube-канале и в Instagram:




Смотрите также
 Сварка
Сварка
Нижегородская обл., рп. Сосновское,
АО "Сосновскагропромтехника", 2023
АО "Сосновскагропромтехника", 2023
Резка KUKA
KUKA
Свердловская обл., рп. Белоярский,
ООО "Капрал Бридж", 2023
ООО "Капрал Бридж", 2023
Сварка
г. Челябинск,
ООО "Промснаб", 2021
ООО "Промснаб", 2021
ОбслуживаниеFANUC
г. Томск,
ФГАОУ ВО «Национальный исследовательский Томский политехнический университет», 2021
ФГАОУ ВО «Национальный исследовательский Томский политехнический университет», 2021
ОбработкаKUKA Укладка и упаковкаKUKA
Укладка и упаковкаKUKA
г. Санкт-Петербург,
АО «Петербургский тракторный завод», 2020
АО «Петербургский тракторный завод», 2020
РезкаKUKA
г. Магнитогорск,
ПАО ММК, 2020
ПАО ММК, 2020
ОбслуживаниеKUKA
г. Сан Франциско,
MIGHTY BUILDINGS, INC, 2020
MIGHTY BUILDINGS, INC, 2020
ОбработкаKUKA


 Позвонить бесплатно
Позвонить бесплатно