




г. Соликамск,
ООО Завод металлических изделий, 2024
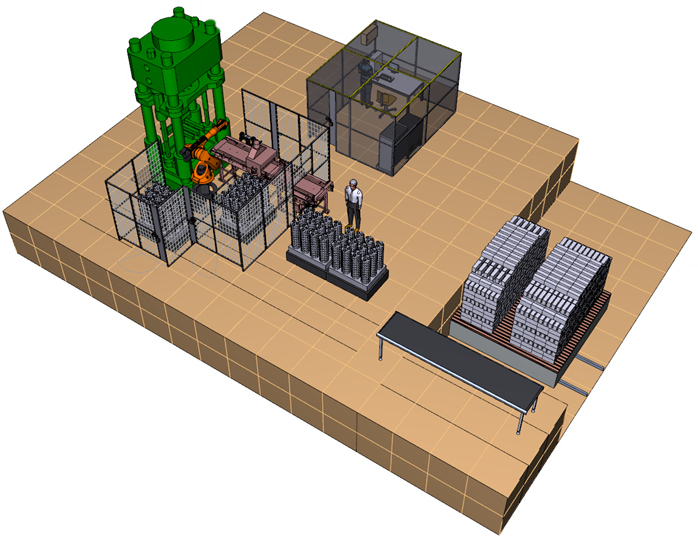
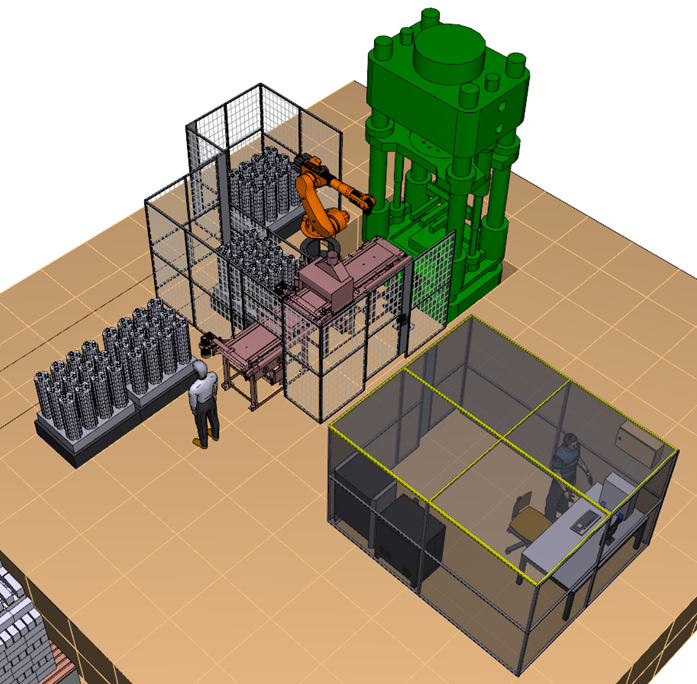
Роботизированный комплекс садки огнеупорных изделий на вагонетку туннельной печи с контролем геометрических и массовых характеристик и отбраковки изделий, обслуживания пресса на базе трех промышленных роботов KUKA

Задача
Состав РТК
- Промышленный робот KUKA KR 60 L30-3
- Контроллер робота KR C4 для робота KUKA KR 60 L30-3
- Пульт управления KUKA smartPAD для робота KUKA KR 60 L30-3
- Опции контроллера KUKA KR C4 для робота KUKA KR 60 L30-3
- Опора для робота KUKA KR 60 L30-3
- Ленточные транспортеры
- Транспортер приема изделия с щеткой для очистки продукции
- Транспортер съема продукции с форсунками для продувками каналов продукции
- Инструменты робота KUKA KR 60 L30-3
- Пневматический захват на базе захвата Schunk для робота KUKA KR60 L30-3
- Комплект пальцев для пневматического захвата
- Кронштейн для крепления устройства смены инструмента и лазерного дальномера к роботу KUKA KR60 L30-3
- Устройство смены инструмента для робота KUKA KR60 L30-3
- Воздушный компрессор для робота KUKA KR60 L30-3
- Инструмент для обслуживания пресса для робота KUKA KR 60 L30-3
- Магазин захватов для робота KUKA KR60 L30-3
- Лазерный дальномер
- Подставка для поддона в рабочей зоне робота
- Подставка для поддонов №3 и №4
- Пультовая РТК
- Помещение пультовой
- Кондиционер
- Промышленный пылесос
- Мебель
- Система безопасности РТК (Комплектация)
- Система управления СУ РТК
- Система управления СУ РТК (Комплектация)
- Система управления СУ РТК (Изготовление)
Технологический процесс
Сценарий №1
- Перед началом прессования транспортер №1 ручного съема изделий (рис. 2) убирается в сторону. Устанавливают транспортер №2 (рис. 2) для подачи шапочного товара в зону работы прессовщика.
- Промышленный робот KUKA KR 60 L30-3 (рис. 2), установленный на левую опору площадки пресса ДО542Н №6 (рис. 2), совместно с прессом производит прессование изделий, одновременно с этим производит необходимое обслуживание технологической оснастки пресса при помощи инструмента для обслуживания пресса. Инструмент для обслуживания пресса автоматически устанавливается на фланец робота с помощью устройства автоматической смены инструмента из магазина инструмента (рис. 2).
- Спрессованный товар пресс укладывает на транспортер №2, по транспортеру товар подается прессовщику, где он укладывает его вручную на поддон №3 и №4.
Сценарий №2
- Перед началом работы убираются все транспортеры. Ставятся поддоны на запланированное место, закрываются ворота ограждения и начинается прессование изделий марки ШВ – 37 №80, ШВ – 42 №54.09.04.11.40, ШВ-42 №КН 494.040.003.А (синяя), ШВ – 42 №КН 494.040.070.С.
- Робот KUKA KR 60 L30-3 по программе производит обслуживание технологической оснастки пресса при помощи инструмента для обслуживания пресса. Инструмент для обслуживания пресса автоматически устанавливается на фланец робота с помощью устройства автоматической смены инструмента из магазина инструмента.
- Робот KUKA KR 60 L30-3 осуществляет съем изделий с нижника пресса и укладывает их на поддон №1 (рис. 2). Для съема и перемещения изделий используется пневматический захват. Пневматический захват автоматически устанавливается на фланец робота с помощью устройства автоматической смены инструмента из магазина инструмента.
- После заполнения поддона №1 подается звуковой и световой сигнал оператору о необходимости заменить заполненный поддон на пустой, а робот продолжает съем изделий с нижника пресса и укладывает их на поддон №2 (рис. 2).
- После заполнения поддона №2 подается звуковой и световой сигнал оператору о необходимости заменить заполненный поддон во второй зоне, а робот продолжает съем изделий с нижника пресса и укладывает их на поддон №1 (при условии подтверждения оператором завершения замены заполненного поддона в этой зоне).
Сценарий №3
- Перед началом работы оператор устанавливает в рабочую зону транспортер №2.
- Робот KUKA KR 60 L30-3 по программе производит обслуживание технологической оснастки пресса при помощи инструмента для обслуживания пресса. Инструмент для обслуживания пресса автоматически устанавливается на фланец робота с помощью устройства автоматической смены инструмента из магазина инструмента.
- Робот KUKA KR 60 L30-3 осуществляет съем изделий с нижника пресса и укладывает их на транспортер №2. Для съема и перемещения изделий используется пневматический захват. Пневматический захват автоматически устанавливается на фланец робота с помощью устройства автоматической смены инструмента из магазина инструмента.
- По транспортеру №2 изделия подаются в рабочую зону прессовщика, где он вручную укладывает их на поддоны №3 и №4.

Смотрите ещё больше интересного на нашем YouTube-канале и в Instagram:




Смотрите также
 Сварка
Сварка
Нижегородская обл., рп. Сосновское,
АО "Сосновскагропромтехника", 2023
АО "Сосновскагропромтехника", 2023
Резка KUKA
KUKA
Свердловская обл., рп. Белоярский,
ООО "Капрал Бридж", 2023
ООО "Капрал Бридж", 2023
Сварка
г. Челябинск,
ООО "Промснаб", 2021
ООО "Промснаб", 2021
ОбслуживаниеFANUC
г. Томск,
ФГАОУ ВО «Национальный исследовательский Томский политехнический университет», 2021
ФГАОУ ВО «Национальный исследовательский Томский политехнический университет», 2021
ОбработкаKUKA Укладка и упаковкаKUKA
Укладка и упаковкаKUKA
г. Санкт-Петербург,
АО «Петербургский тракторный завод», 2020
АО «Петербургский тракторный завод», 2020
РезкаKUKA
г. Магнитогорск,
ПАО ММК, 2020
ПАО ММК, 2020
ОбслуживаниеKUKA
г. Сан Франциско,
MIGHTY BUILDINGS, INC, 2020
MIGHTY BUILDINGS, INC, 2020
ОбработкаKUKA


 Позвонить бесплатно
Позвонить бесплатно