







 Позвонить бесплатно
Позвонить бесплатно
Спецификация отправлена на Ваш E-mail.
Данное письмо может попасть в папку "СПАМ"
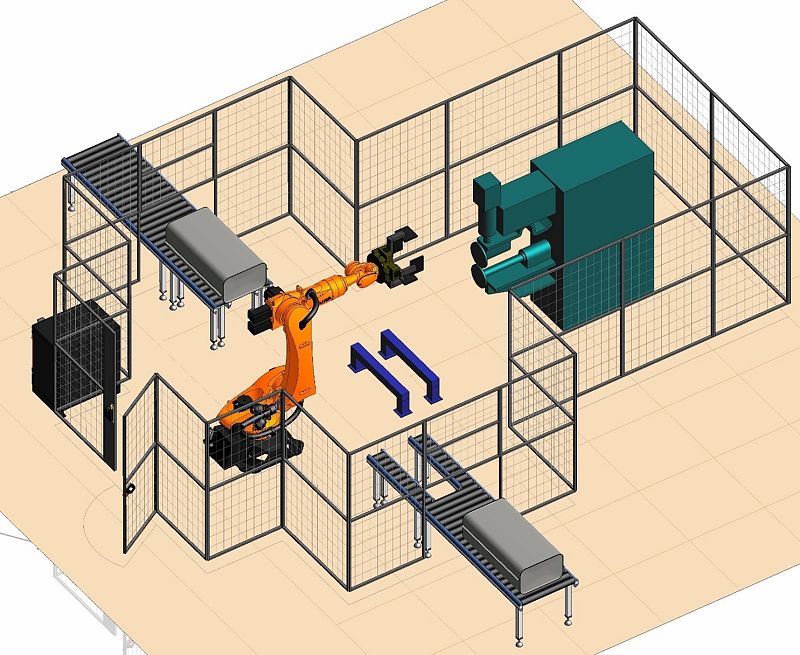
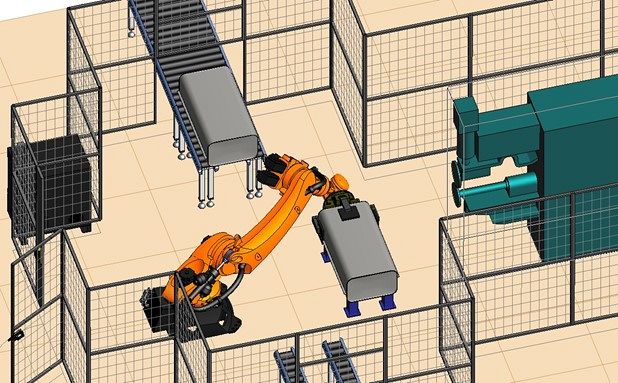
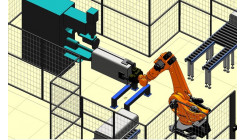
Робото-технологический комплекс (РТК) для шовной контактной сварки корпусов топливных баков
Описание технологического процесса
- Оператор устанавливает на захват робота пальцы необходимого типоразмера.
- Оператор запускает программу для необходимого типоразмера бака с пульта управления.
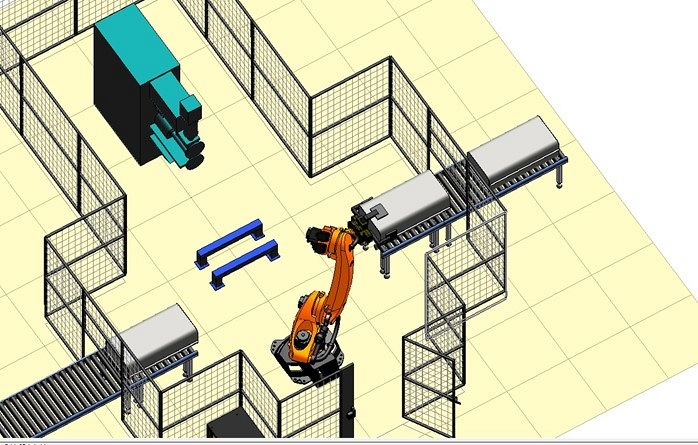
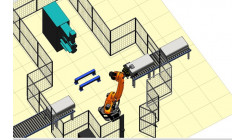
- Персонал укладывает бак, предварительно собранный на прихватках на конвейер, по которому он поступает на участок РТК. Бак останавливается, дойдя до упоров в конце конвейера.
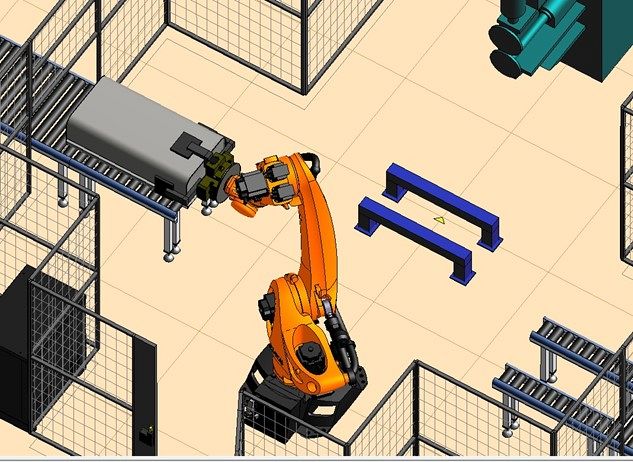
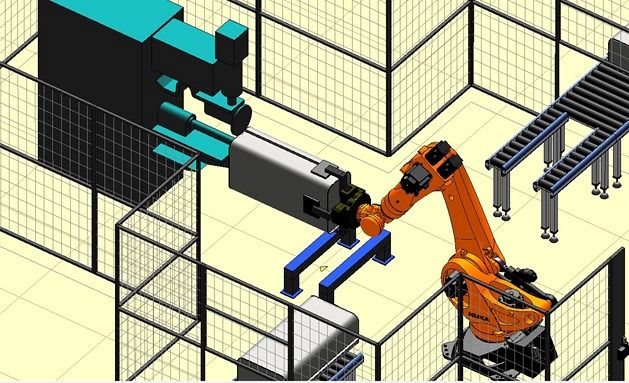
- На контроллер робота подается сигнал о наличия бака в зоне pick point. Робот захватывает бак за торец и устанавливает его в рабочую зону сварочной машины.
- Начинается процесс сварки. Робот в процессе сварки перемещает бак синхронно с вращением сварочных роликов, таким образом что бы обеспечивался ровный и качественный сварной шов.
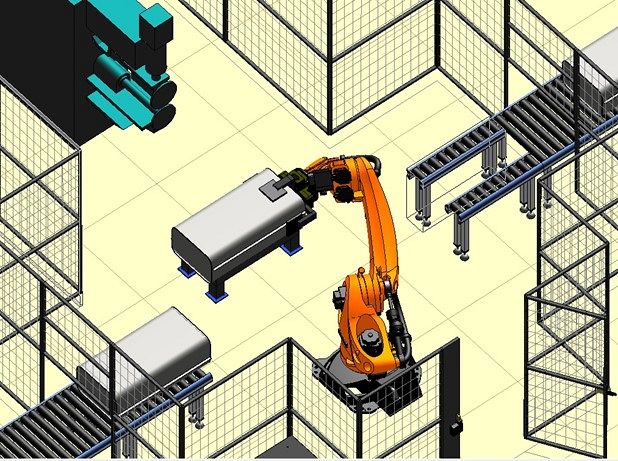
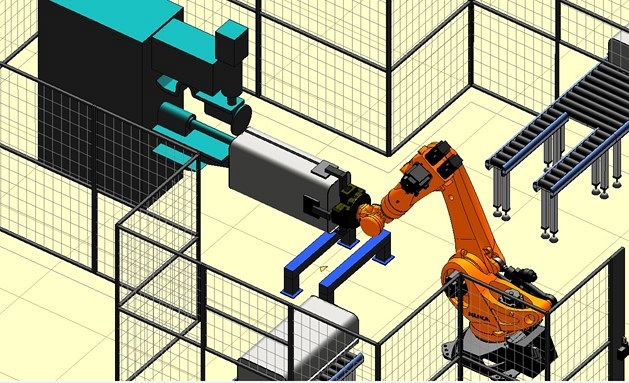
- После завершения приварки дна с одного торца бака робот устанавливает бак на станцию для перехвата. Далее робот захватывает бак со станции для перехвата за другой торец и устанавливает его в рабочую зону сварочной машины.
- Начинается процесс сварки. Робот в процессе сварки перемещает бак синхронно с вращением сварочных роликов, таким образом что бы обеспечивался ровный и качественный сварной шов.
- После завершения сварки робот устанавливает бак на отводящий конвейер place point, по которому он отводится за пределы участка РТК.



Смотрите ещё больше интересного на нашем YouTube-канале и в Instagram:




