








 Позвонить бесплатно
Позвонить бесплатно
Спецификация отправлена на Ваш E-mail.
Данное письмо может попасть в папку "СПАМ"
Роботизированные ячейки для автоматизированного нанесения маркировки на рулон
Описание РТК
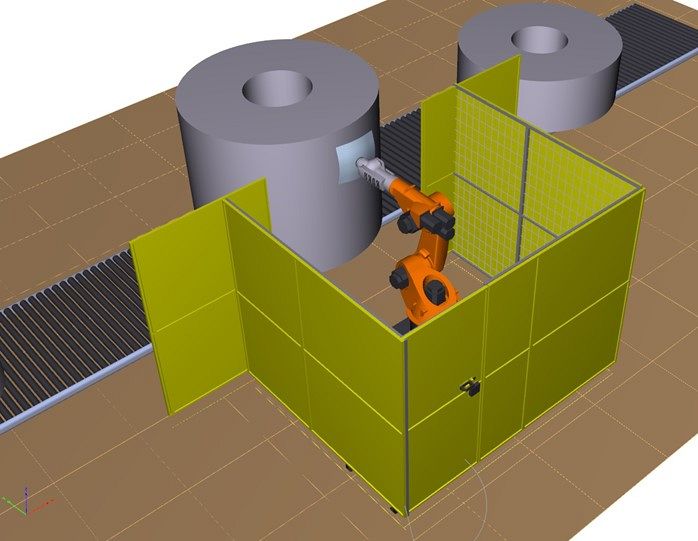
В состав РТК для нанесения маркировки робот KUKA KR 30-3 F, который установлен на пьедестале. Робот оснащен одним контроллером KRC 4. На роботе на специальном кронштейне установлены: защитный экран от теплового излучения, маркировочная головка и лазерный дальномер. На небольшом удалении от робота стоит контроллер KRC 4 и промышленный ПК.
РТК устанавливается внутри камеры с теплозащитным слоем, имеющую систему кондиционирования и обогрева. Камера имеет двери с автоматическим приводом.
Описание технологического процесса
Исходное положение: робот занимает такое исходное положение в защитной камере, чтобы части робота не мешали открытию/ закрытию автоматических дверей камеры.
Алгоритм работы:
1. Робот находится в исходном положении . Двери камеры закрыты.
2. В систему управления РТК от контроллера управления маркировочной головкой передается информация с характеристиками ожидаемого рулона.
3. Рулон перемещается по пластинчатому транспортёру в рабочую зону робота c точностью ± 150 мм в продольном направлении и ± 50 мм в поперечном направлении.
4. Двери камеры открываются. Робот проходя лазерным дальномером по линии перпендикулярно образующей рулона около 500 мм. производит несколько десятков измерений, данные снятые при сканирование передаются на контроллер робота, где происходит вычисление центра рулона и его диаметр, а также определяется его положение относительно системы координат робота.
5. Далее робот направляет лазерный дальномер на верхний торец рулона. Имея информацию по месту положения плоскости транспортера, на котором расположен рулон, в системе координат робота происходит вычисление высоты рулона.
6. При получении всей информации по пришедшему рулону происходит сопоставление характеристик с информацией полученной от контроллера управления маркировочной головкой.
7. При несовпадении фактических и ожидаемых характеристик, рулон не маркируется, а перемещается дальше по пластинчатому транспортеру. Сведения о различиях характеристик передаются от контроллера робота на контроллер управления маркировочной головкой.
8. При совпадении фактических и ожидаемых характеристик запускается программа маркировки. Робот начинает движение по заложенной заранее траектории для данного типоразмера рулона.
9. Текущая скорость перемещения маркировочной головки, информация о неисправностях и аварийных ситуациях при их возникновении и другая важная информация передаётся контроллером KRC4 на контроллер управления маркировочной головкой.
10. После прохождения всей траектории робот возвращается в начальное положение, двери камеры закрываются и на контроллер управления маркировочной головкой подаётся сигнал окончания операции маркировки.
11. Рулон перемещается дальше по пластинчатому транспортёру. РТК ожидает сигнал о поступлении следующего рулона в зону обработки.
12. Цикл повторяется с п.2.
Смотрите ещё больше интересного на нашем YouTube-канале и в Instagram:




