



Роботизированные комплексы 3D-сканирования
Описание
3D сканирование – это анализ объектов реального мира с целью восстановления их полного внешнего вида с помощью цифровой 3D модели.
Области применения:
- Контроль качества изделий на производстве
- Реверс-инжиниринг
- Картография и геодезия
- Археология
- Медицина (стоматология и пластическая хирургия)
- Сканирование архитектурных сооружений

Для сканирования с применением роботов наиболее подходящей следует считать задачу контроля качества изделий так как необходимо выполнять многократное сканирование одних и тех же объектов, чьи размеры в большинстве случаев сопоставимы с рабочей областью робота.
Типы сканирования:
Лазерное сканирование – принцип работы схож с работой лазерного дальномера: в трехмерном пространстве рассчитывается скорость перемещения лазерного импульса с точки, в которой установлено устройство, до объекта и обратно. Если объединить все полученные данные – получится своеобразное точечное облако в трехмерном пространстве. Еще одним способом получения и расчета данных является триангуляция.
Триангуляция используется в портативных 3d сканерах, а принцип работы заключается в том, чтобы записать положение объекта, которое потом используется в расположении объекта относительно поля зрения камеры. Для ускорения процесса, лазерный импульс используется для просчета нескольких точек одновременно.
Особенности:
- используются обычно для сканирования на больших расстояниях;
- может использоваться в помещениях с любой освещенностью;
- может сканировать части любого материала;
- большая глубина резкости;
- лазерный свет может быть разрушительным для глаз, поэтому на лучи смотреть не стоит.
3D сканеры с LED подсветкой - Такие сканеры используют в качестве шаблона для обнаружения объектов – полосы, а основными методами создания моделей являются: создание лазерных помех и проекций. Последний использует два плоских лазерных луча, для создания двух равноудаленных линий. Такой метод полезен для создания изображения, с практически неограниченной глубиной резкости, то есть объект может находиться как на далеком, так и на близком расстоянии от лазеров, при этом качество полученной картинки не будет меняться.
Контактный 3D сканер – на роботе смонтирован щуп, который при контакте с объектом передает данные о перемещении на компьютер.
Особенности:
- высокая точность работы, с возможностью последующего экспорта в CAD пакеты;
- не применим к хрупким объектам.
SL сканеры и Фотограмметрия – не нашли широкого применения в робототехнике.
Особенности роботизированных сканеров
При сканировании множества однотипных объектов (решение задачи контроля качества изделий) лучше всего доверить процесс роботам и освободить человека от рутинных процессов. Как правило, это не даёт значительной прибавки в скорости сканирования, зато делает результат стабильным и повторяемым.
Особенности при сканировании при помощи роботов
При ручном сканировании человек видит объект и получаемый результат в реальном времени и может оценить, в каких местах недостаточно данных и где находятся отверстия.
При роботизированном сканировании робот не имеет дополнительных средств контроля объекта (например, как глаза человека), он познает объект в реальном времени с помощью сканера, и, он должен принимать решения в зависимости от получаемых данных либо передвигаться по заранее определённым координатам.
Пути решения этих особенностей
Подход 1 - Получить избыточное количество данных т.е. отсканировать объект со всех возможных ракурсов.
Минусы вполне очевидны:
- Продолжительное время сканирования
- При сканировании объектов с полостями, с отверстиями, ребрами жесткости на литых деталях все равно будут наблюдаться разрывы в скане и «белые пятна» т.к. полученных данных не хватит.
Подход 2 – следовать по заведомо известной траектории с базированием объекта.
Данный подход является наиболее интересным в серийном и массовом производстве, сканироваться могут даже конкретные интересующие области изделия, а остальные данные игнорироваться.
Подход 3 – в зависимости от наблюдаемого объекта выбрать минимальное количество видов и оптимальную траекторию движения руки со сканером таким образом, чтобы добиться максимального покрытия объекта.
По получаемым данным строится замкнутая поверхность. После чего итеративно наблюдаются области по которым самая низкая достоверность (поверхность есть, но точек, её подтверждающих — нет). Наблюдаем область — > пересчитываем модель — >наблюдаем область. В итоге получается целая серия последовательных сканов в результате которой робот “познаёт” объект.
Алгоритмов, позволяющих строить недостающие элементы сетки существует несколько:
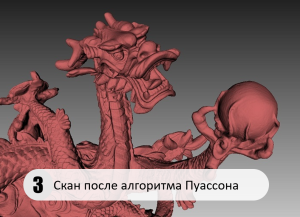
- Восстановление Пуассона «Poisson Reconstruction» (наиболее результативный)
- Smooth Signed Distance Surface Reconstruction (предложен F. Calakli and G. Taubin в 2011г., схож с алгоритмом Пуассона но проще в реализации)
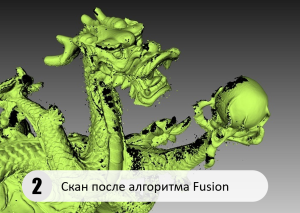
- Алгоритм Fusion (делает усреднение данных и контроль положения, наименее действенный, но простой в реализации)
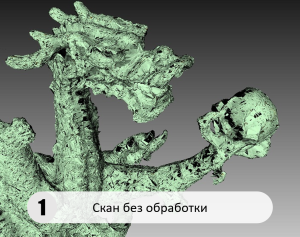
После применения любого из выбранных алгоритмов производится повторный анализ тех областей, в которых данные наименее достоверные (те данные, которые были аппроксимированы), процесс повторяется n-ное количество раз, после чего выдается готовый результат в виде облака точек.
1 – скан без обработки, 2 – применён метод Fusion, 3 – применён метод Пуассона
Обсудить в соцсетях






Похожие товары

Основное оборудование помимо робота — это комплект сварочного оборудования. Есть много... читать далее

Технология позволяет резать практически любые материалы:
черные металлы и... читать далее

Область применения
Плазменные системы, применяемые в роботизированных комплексах, используются для... читать далее



 Позвонить бесплатно
Позвонить бесплатно