




г. Соликамск,
ООО Завод металлических изделий, 2024
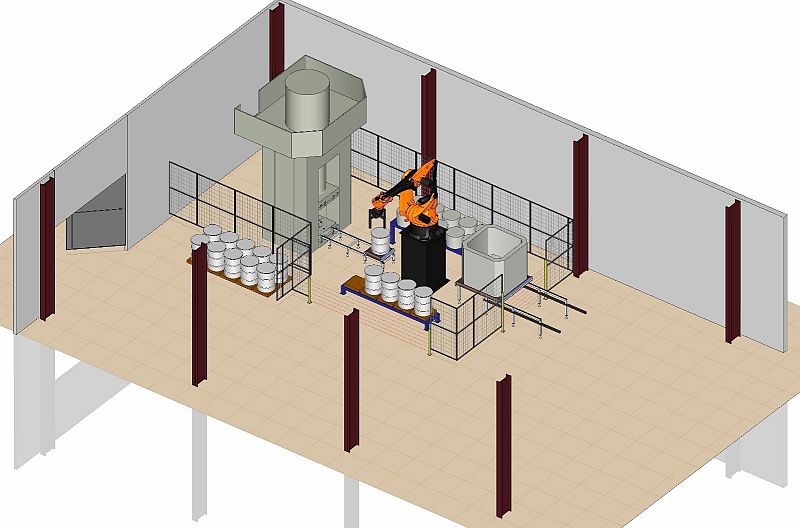
Роботизированный комплекс перемещения бочек/тюбов при утилизации радиоактивных отходов АО «Энерготекс»

Задача
Состав РТК
-
Робот Kuka KR 700 PA в комплекте:
- контроллер;
- пультом управления;
- системное ПО;
- 16/16 цифровых входа/выхода
- Интерфейс EtherNet/IP 2.0 -
Пневмомеханическое захватное устройство для перемещения бочек/брикетов:
- Захват механический, грузоподъемность 600 кг.
- Переходной фланец для установки захвата на роботе - Весы для взвешивания бочки
- Лазерный дальномер (для определения положения и высоты брикета)
- ПО для генерирования схемы укладки брикетов в бетонный контейнер
- Защитный чехол для робота KR 700 PA (цвет белый) с возможностью дезактивации растворами следующих составов: КаОН (5%) + КМп04 (0,5%); HN03 (0,5%) + Н2С204 (0,5%)
- Система управления РТК: контроллер Omron NX1P; подключаемая переносная панель Omron NB10W-TW01B и др.
- Прочее: шкаф управления, кабели, крепежные элементы
- Техническая документация на русском языке, 1 комплект
Технологический процесс
- Персонал устанавливает бочки на специальный накопитель.
- Оператор запускает управляющую программу с пульта управления РТК.
- Робот захватывает бочку из накопителя и устанавливает на весы. После замера веса бочки робот устанавливает бочку на подвижную платформу пресса.
- Бочка перемещается на платформе в рабочую камеру пресса и прессуется. После прессования брикет перемещается на платформе обратно в рабочую зону робота.
- После завершении процесса прессования и выхода брикета из пресса с контроллера пресса на контроллер робота поступают сигнал о наличии брикета в зоне съема.
- Робот при помощи лазерного дальномера определяет положение и высоту брикета, захватывает его и устанавливает на накопитель для брикетов.
- Далее п.п. 3-6 повторяются до тех пор, пока не заполнится весь накопитель брикетов.
- После заполнении накопителя брикетов генерируется программа оптимальной схемы укладки брикетов в бетонный контейнер.
- Робот в соответствии со схемой укладки укладывает брикеты в контейнер.
- Далее цикл повторяется.



Смотрите ещё больше интересного на нашем YouTube-канале и в Instagram:




Смотрите также
 Сварка
Сварка
Нижегородская обл., рп. Сосновское,
АО "Сосновскагропромтехника", 2023
АО "Сосновскагропромтехника", 2023
Резка KUKA
KUKA
Свердловская обл., рп. Белоярский,
ООО "Капрал Бридж", 2023
ООО "Капрал Бридж", 2023
Сварка
г. Челябинск,
ООО "Промснаб", 2021
ООО "Промснаб", 2021
ОбслуживаниеFANUC
г. Томск,
ФГАОУ ВО «Национальный исследовательский Томский политехнический университет», 2021
ФГАОУ ВО «Национальный исследовательский Томский политехнический университет», 2021
ОбработкаKUKA Укладка и упаковкаKUKA
Укладка и упаковкаKUKA
г. Санкт-Петербург,
АО «Петербургский тракторный завод», 2020
АО «Петербургский тракторный завод», 2020
РезкаKUKA
г. Магнитогорск,
ПАО ММК, 2020
ПАО ММК, 2020
ОбслуживаниеKUKA
г. Сан Франциско,
MIGHTY BUILDINGS, INC, 2020
MIGHTY BUILDINGS, INC, 2020
ОбработкаKUKA


 Позвонить бесплатно
Позвонить бесплатно